
はじめに
こんにちは、ロボットクリエイターミノです。
今回は私が1体目に製作(自作)した二足歩行ロボット「robomo-01」についてご紹介していこうと思います。
この二足歩行ロボットは部品製作から基板製作・プログラミングに至るまで全て自作で、私にとって初めての本格的な電子工作とプログラミングを融合した作品であり、幾度も挫折を経験しましたが、完成させたときの感動は今でも鮮明に記憶しています。
本記事では、「robomo-01」の製作過程や工夫したポイント、初心者が取り組むためのアドバイスもご紹介致します。
使用部品
このロボットに使用した主な部品をご紹介致します。
【機体系】
・アルミ板・・・・・・・・A5052 板厚1.2mm
・サーボモータ・・・・・・Vstone「VS-S020A」(16個使用)
・ブッシュ・・・・・・・・プラスチック材削り出し
・ボールリンク・・・・・・RCカー用
・ボルト・・・・・・・・・M2、M3ネジ
【制御系】
・マイコン・・・・・・・・PIC16F84A(PICマイコン) ※マイコンはマイクロコントローラの略になります。
・基板・・・・・・・・・・サンハヤト「ICB-288G」
・セラロック・・・・・・・10MHz
・抵抗・・・・・・・・・・10kΩ(サイズ1/4W)
・タクトスイッチ
・ピンヘッダ
・ICソケット
・鈴メッキ線
・電線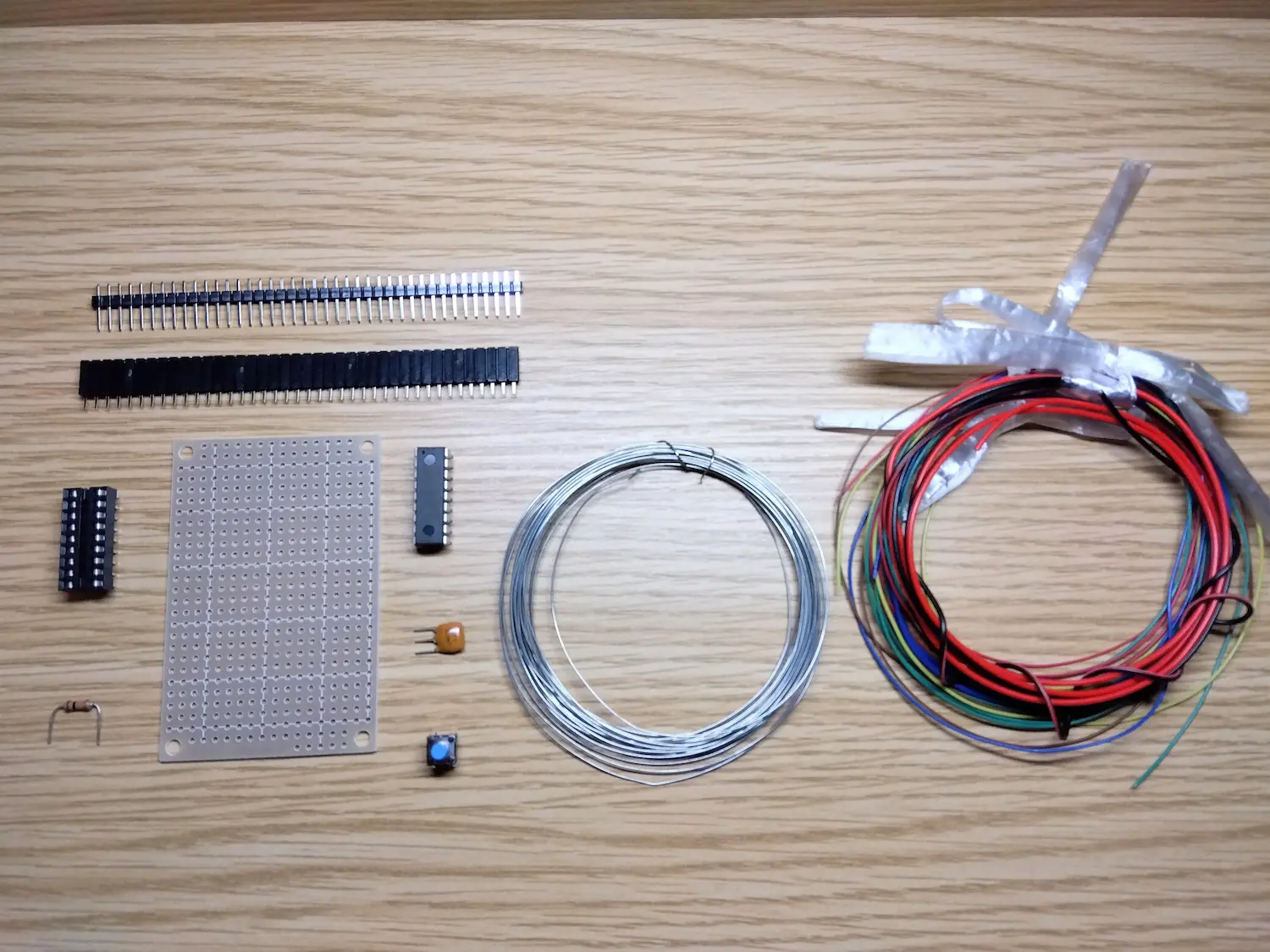
【電源系】
・バッテリー・・・・・・・Panasonic「EVOLTA単4形」(ニッケル水素電池)
・充電器・・・・・・・・・Panasonic「BQ-CC83」
・バッテリーケース・・・・単4形4本用
※電源はサーボモータ動力用とマイコン制御用の2系統を用意します。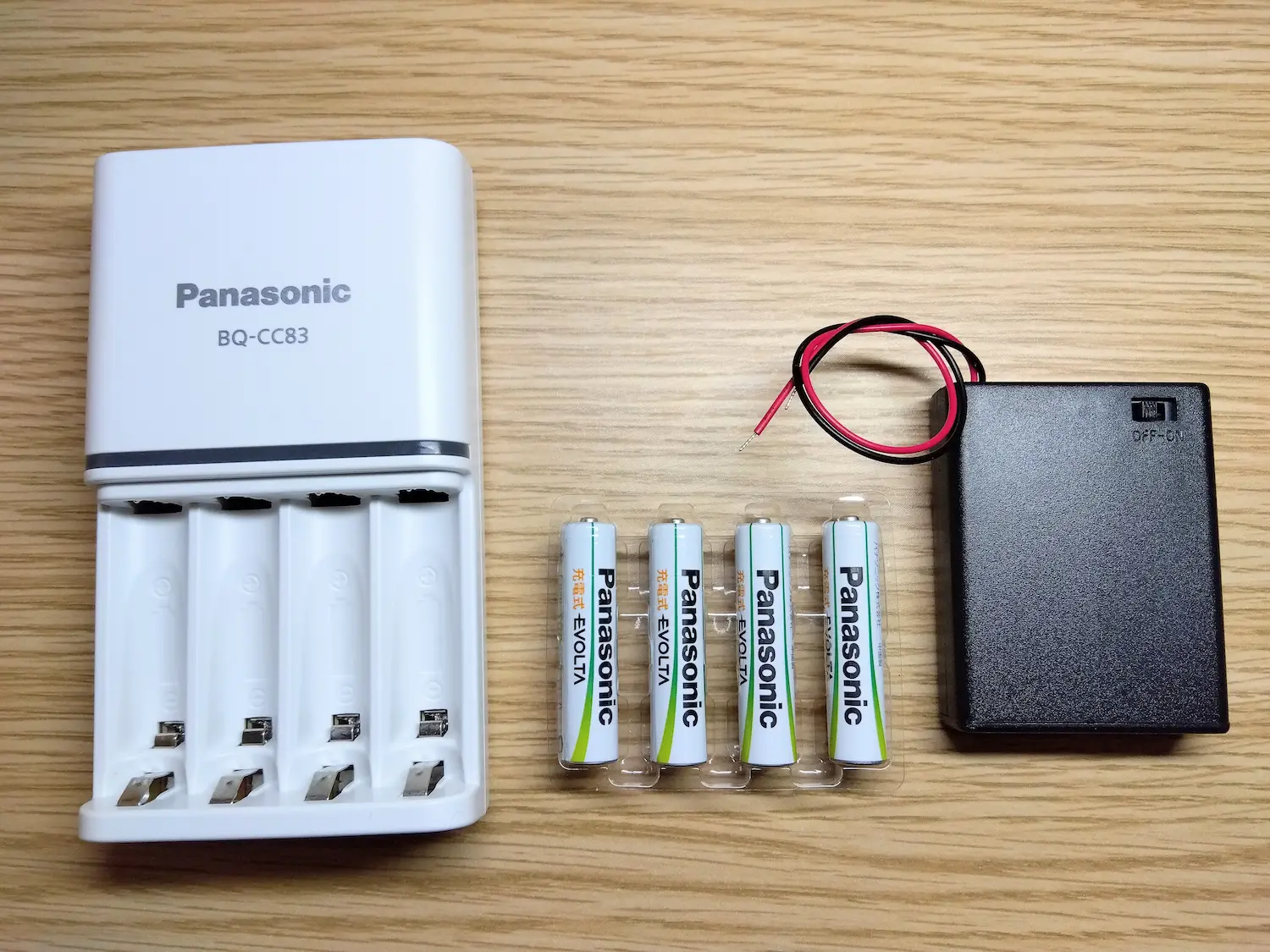
使用ツール(開発環境・ソフト類を含む)
このロボット作製時の開発環境についてご紹介致します。
・ノート型パソコン(PC)・・・・・・この時はWindows7
・プログラム用ソフト・・・・・・・マイクロチップテクノジー「MPLAB IDE v8.84」(使用言語:アセンブラ)
ホームページからダウンロード(無料)
・書込み用ツール・・・・・・・・・アドウィン「PIC プログラマーA+」
・書込みツール用ソフト・・・・・・アドウィン「PICpro」
製作工程
1、設計検討
まずはどの様なロボットを作りたいのかをイメージします。
初心者(当時の私も含め)が最初からこの様な本格的な二足歩行ロボットを設計する事は非常に困難なので
この時は市販の二足歩行ロボットを参考に設計を進める事にしました。
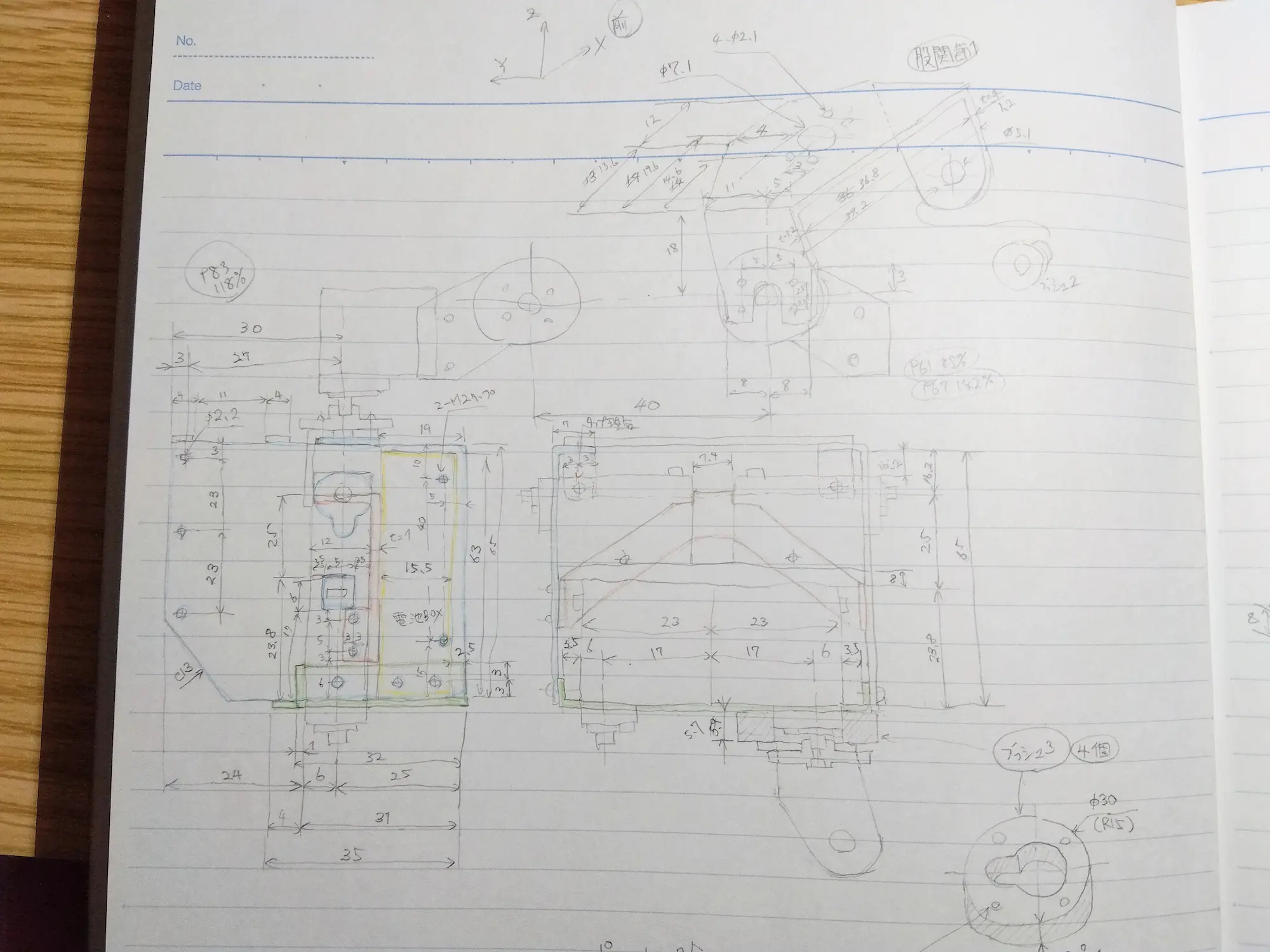
設計始めは、まず絵を描くことから。
そしてその構造や可能であれば寸法なども大まかに決めていきます。
当時のスケッチはこんな感じ・・
(サーボモータもきちんと採寸します)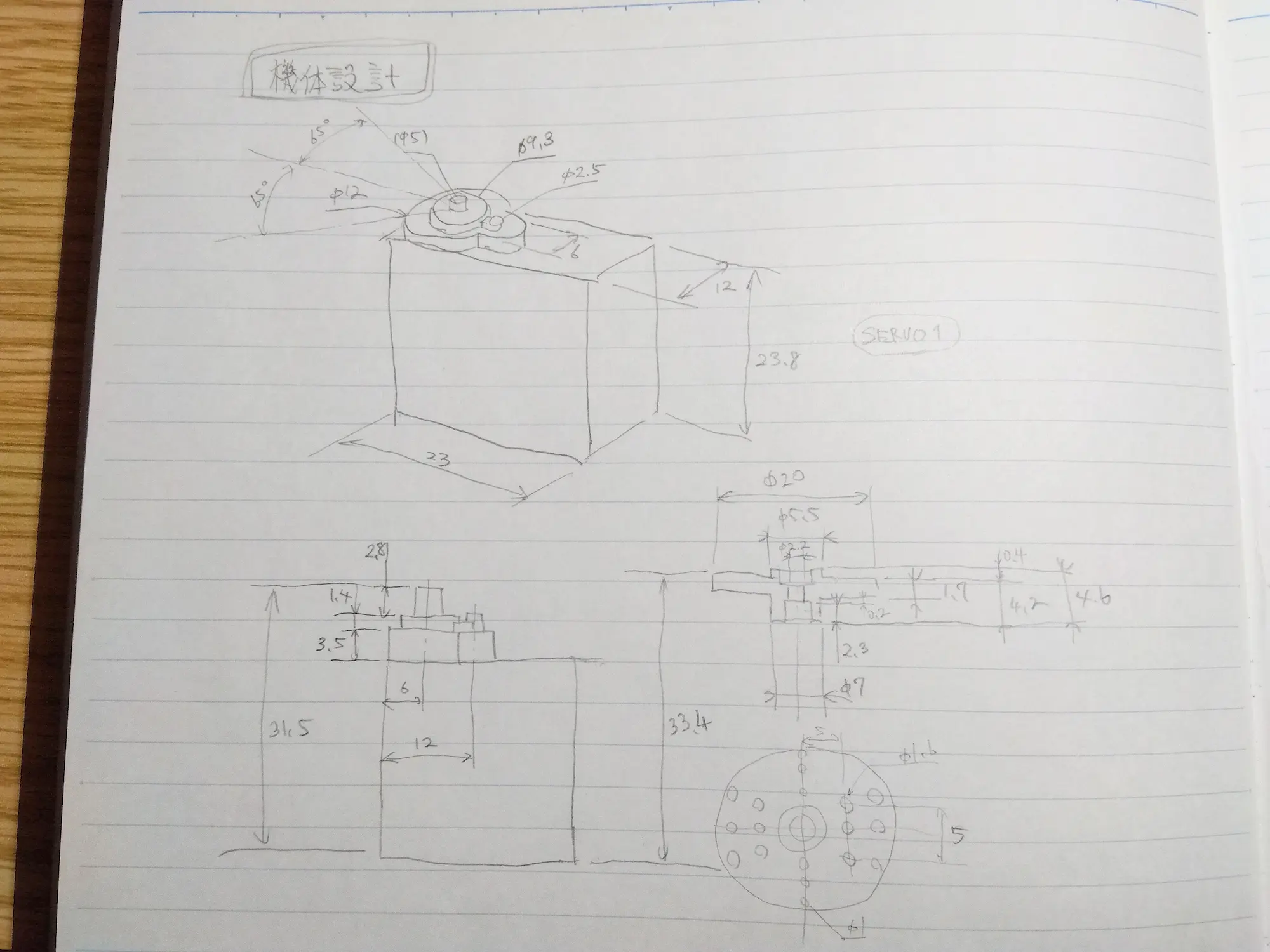
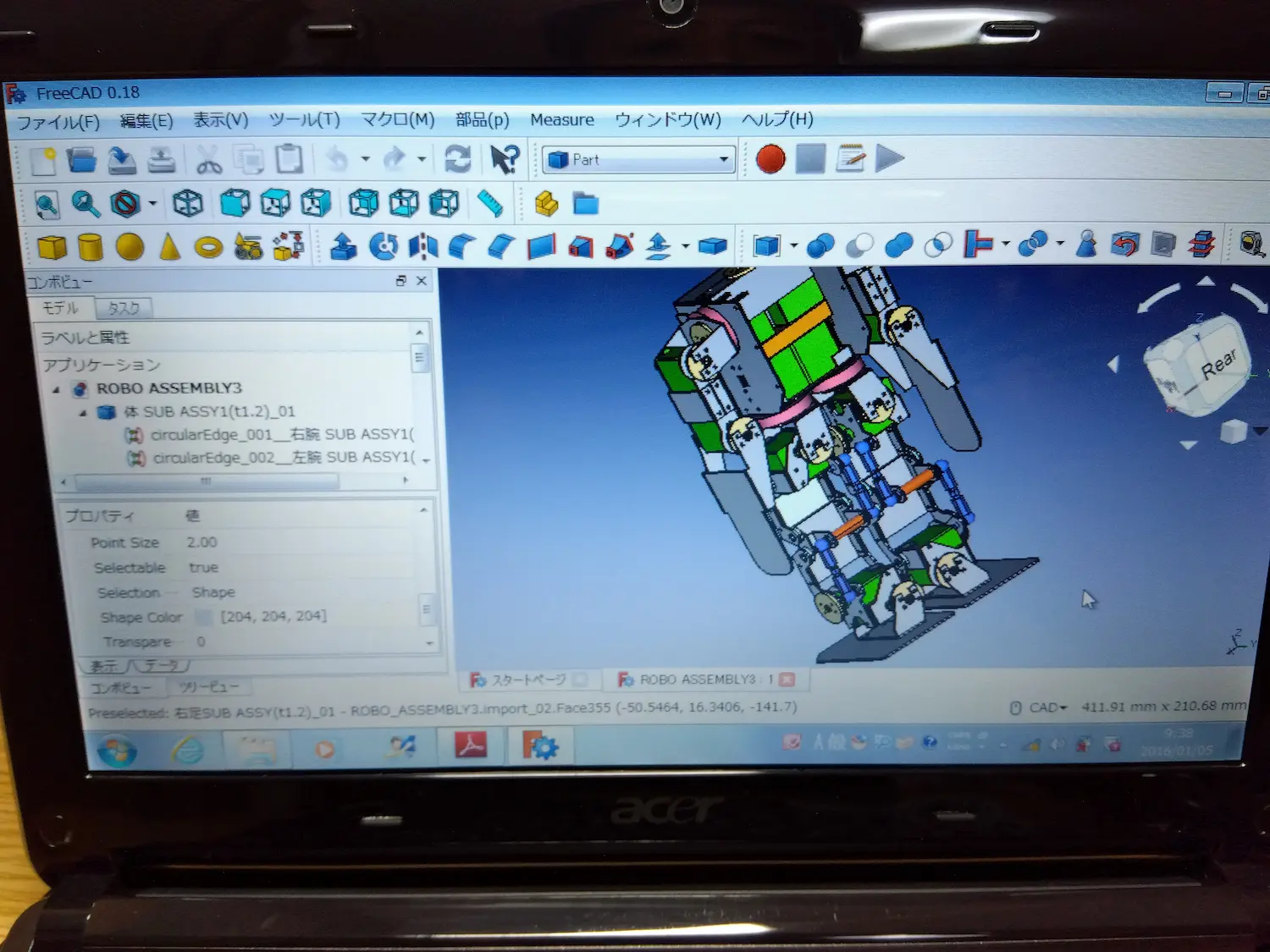
この時は構造が複雑だった事もあり3D設計も実施しました。
※3D設計用ソフト「FreeCAD」(ネット上からダウンロード(無料))を使用。
(主に各部品を組合せた時に設計ミスが無いかの確認用として使用)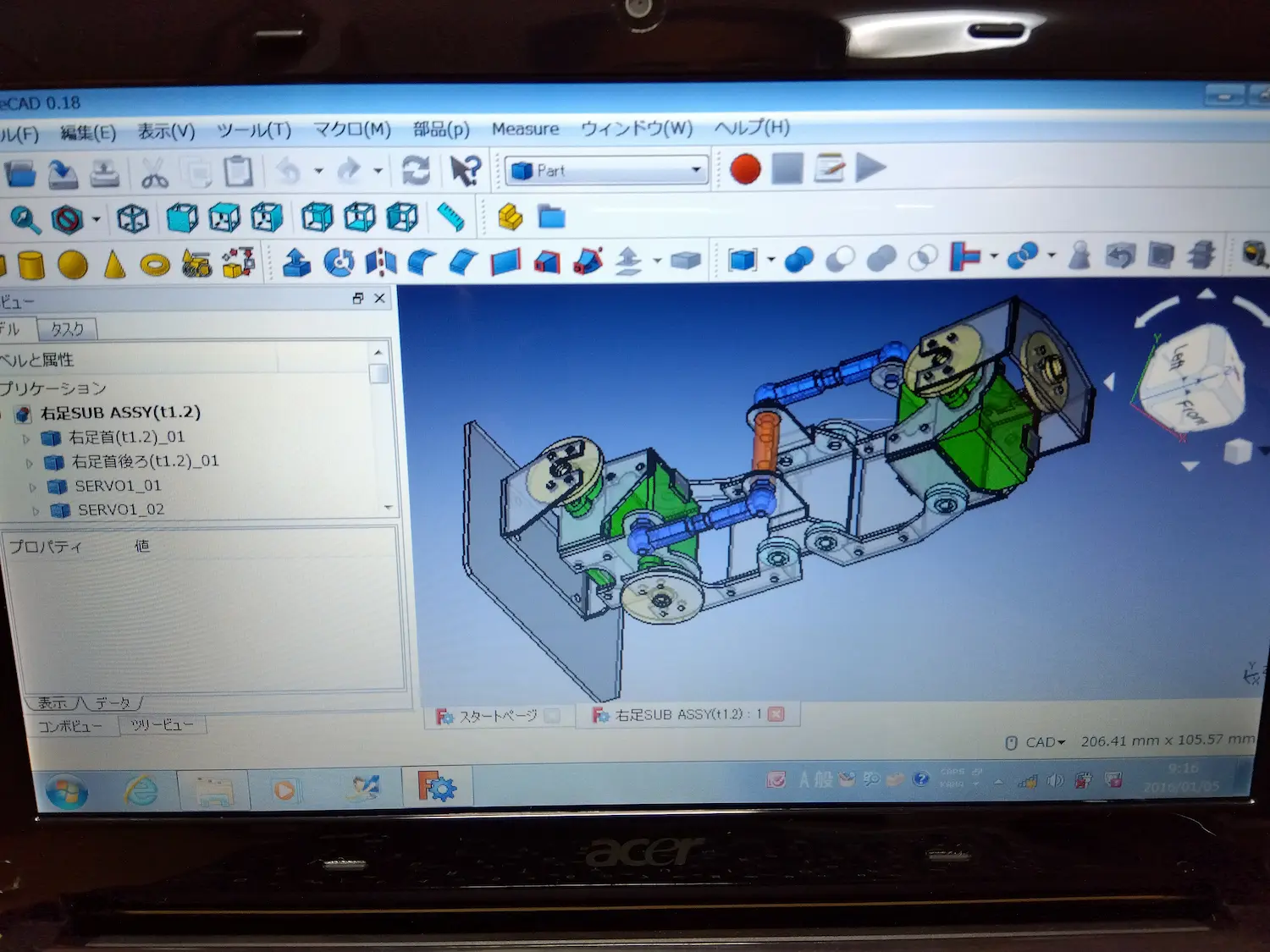
2、部品製作
【アルミ部品の製作】
先に設計した部品の展開図を作図します。
アルミ材料は薄板なので板上に開いた絵を作成します。
そしてそれをアルミ板に「のり」で張り付け、その通りにアルミをカットしていきます。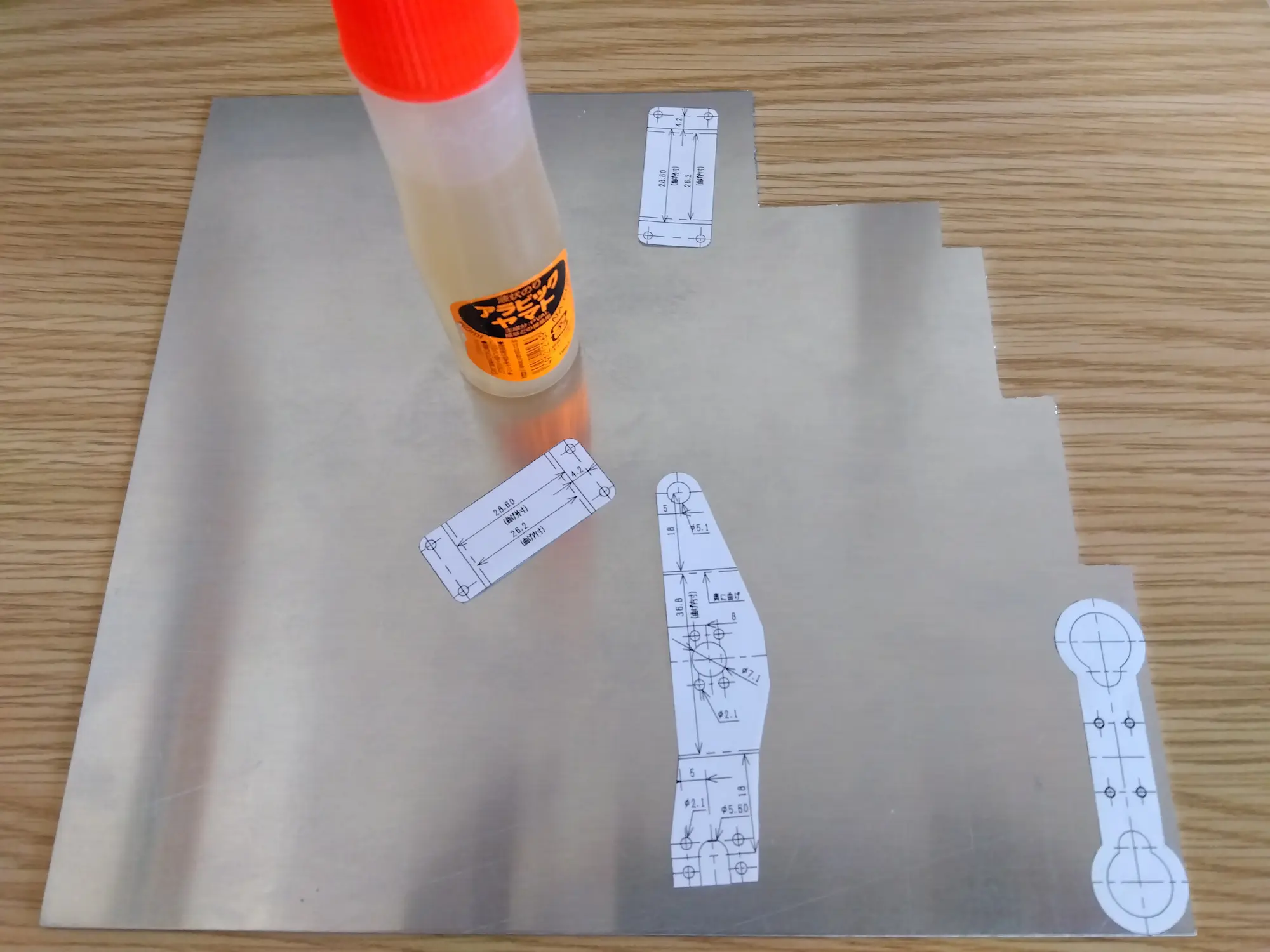
アルミ板のカットは金属用ノコギリ(ホームセンターで購入)を使用しました。
ものによっては先に穴を開けておきます。(穴あけは電動ドリルを使用)
ノコギリで処理しきれない所は、サンダーやグラインダー、ヤスリ等を使用すると良いでしょう。
※電動工具を使用する時は保護メガネの着用も忘れずに。
とにかく地道な作業が続きます(^^;)
部品のカットが終了したら次は曲げ加工。
私は小型の万力を使用して、部品を叩いて曲げを行いました。
曲げ方を失敗すると、作り直しになるので慎重に。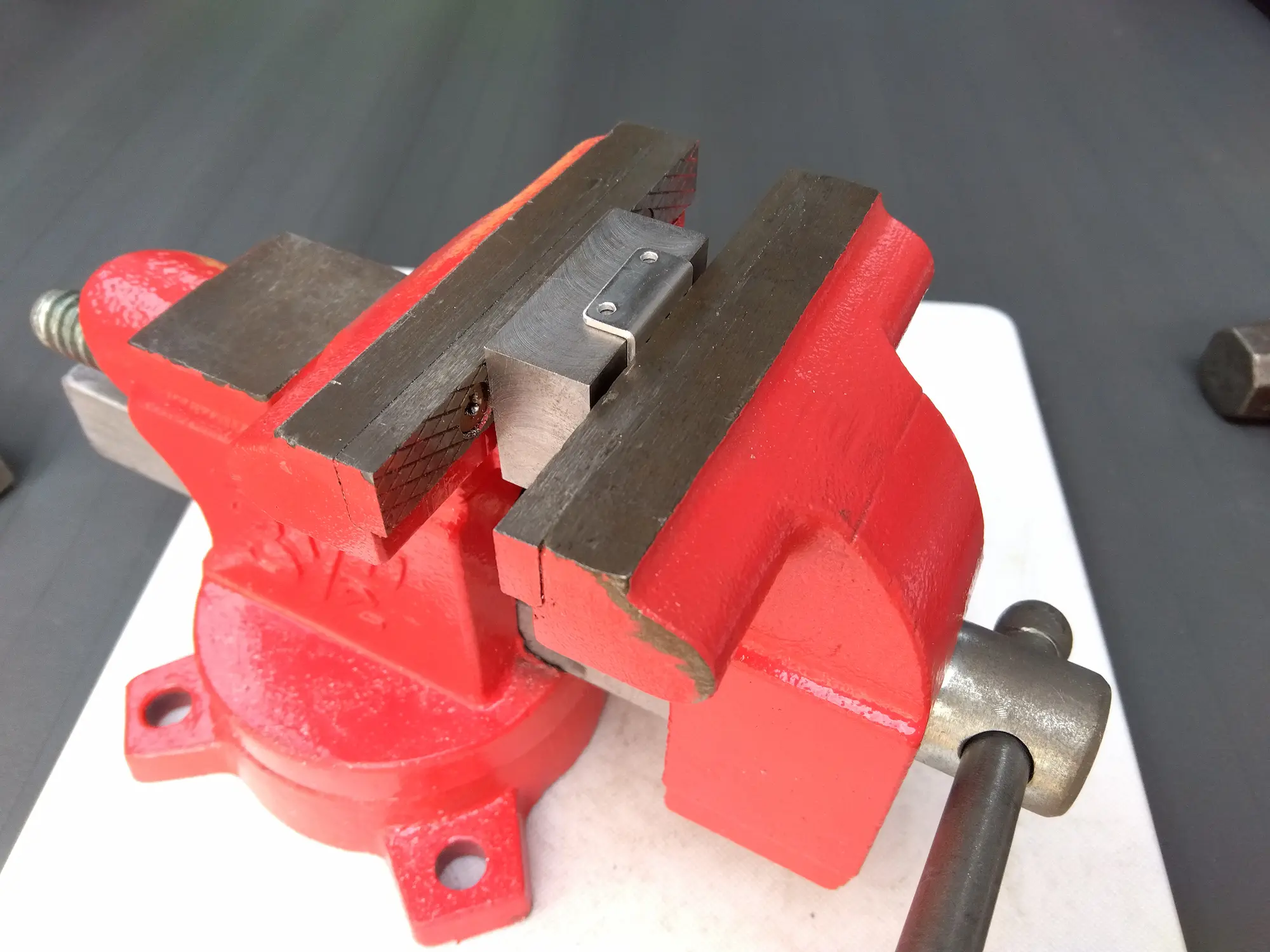
【基板・電線の製作】
基板は事前に回路図を作成しておき、それに従って作成。ハンダ作業になります。
使用部品が少ないのでわりと簡単に出来てしまいます。
電線類も現合にて長さを決めて製作しております。コネクター類はピンヘッダーを使用。
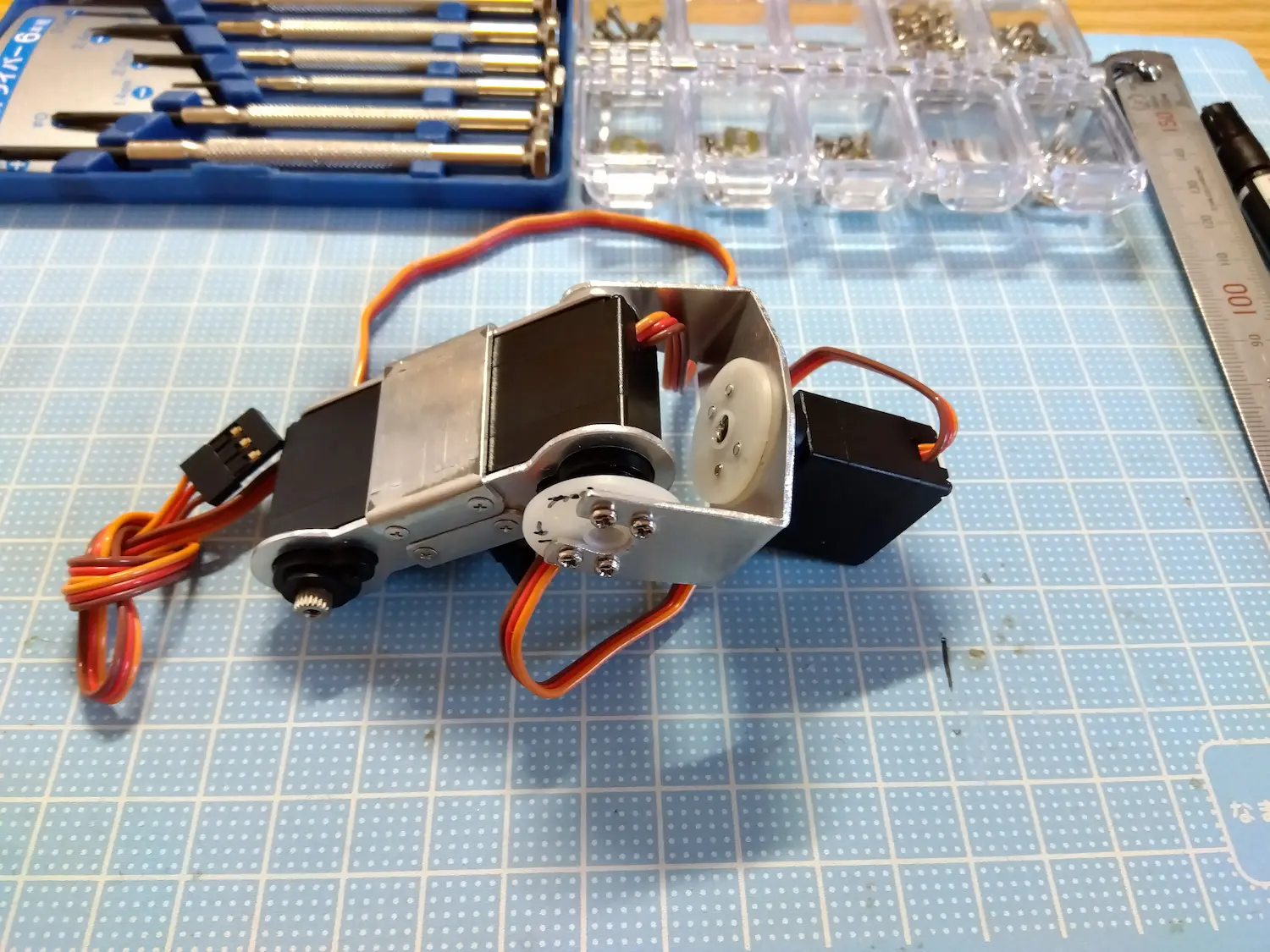
3、組立調整
製作した部品とサーボモータを組立てていきます。
組付けミスがないか時折、過去のスケッチや3D CADを確認しながらになります。
この時に各関節部の動作に異常が無いかを手で動かしながら確認します。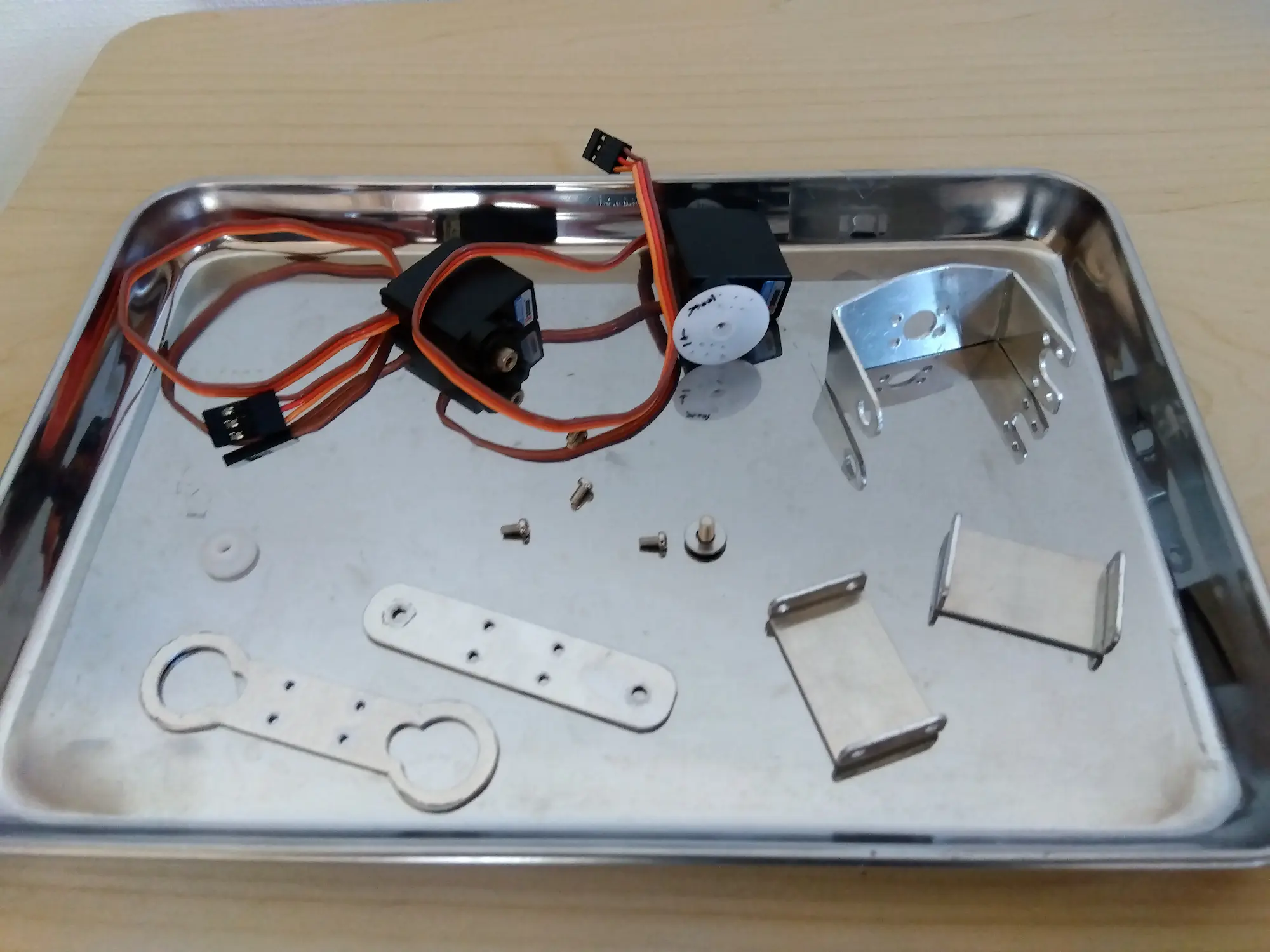
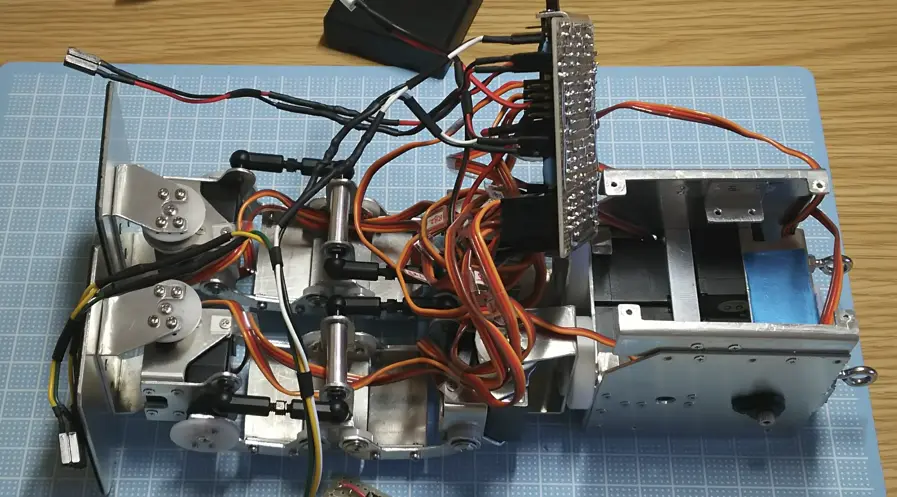
4、全体の確認
一通り組立てが完了したら、全体をくまなくチェック。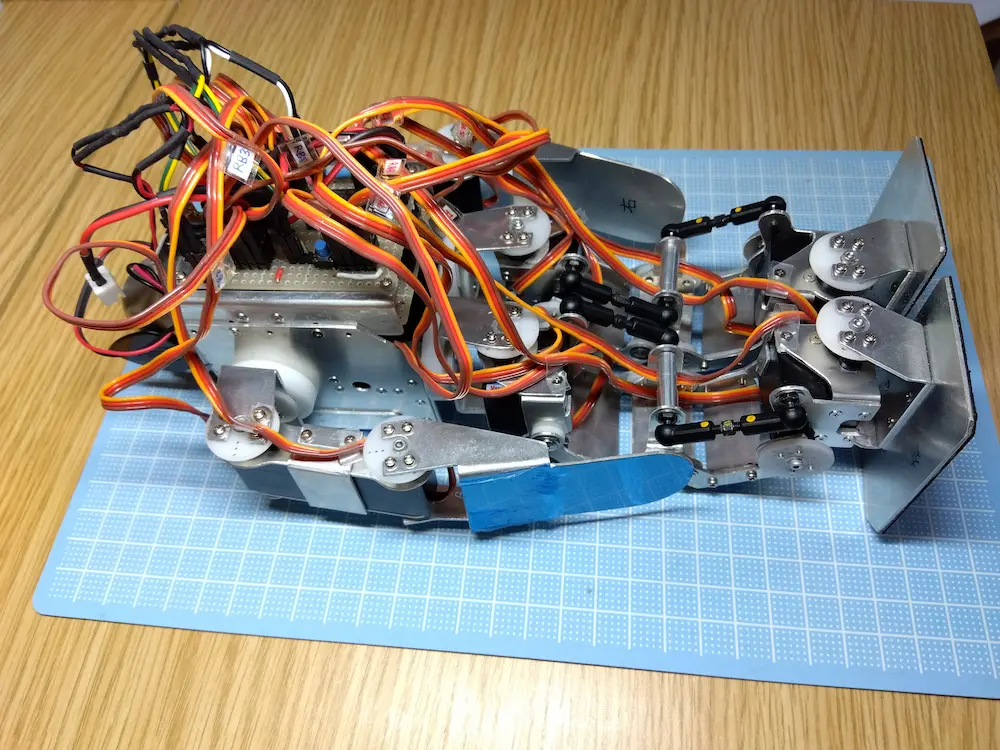
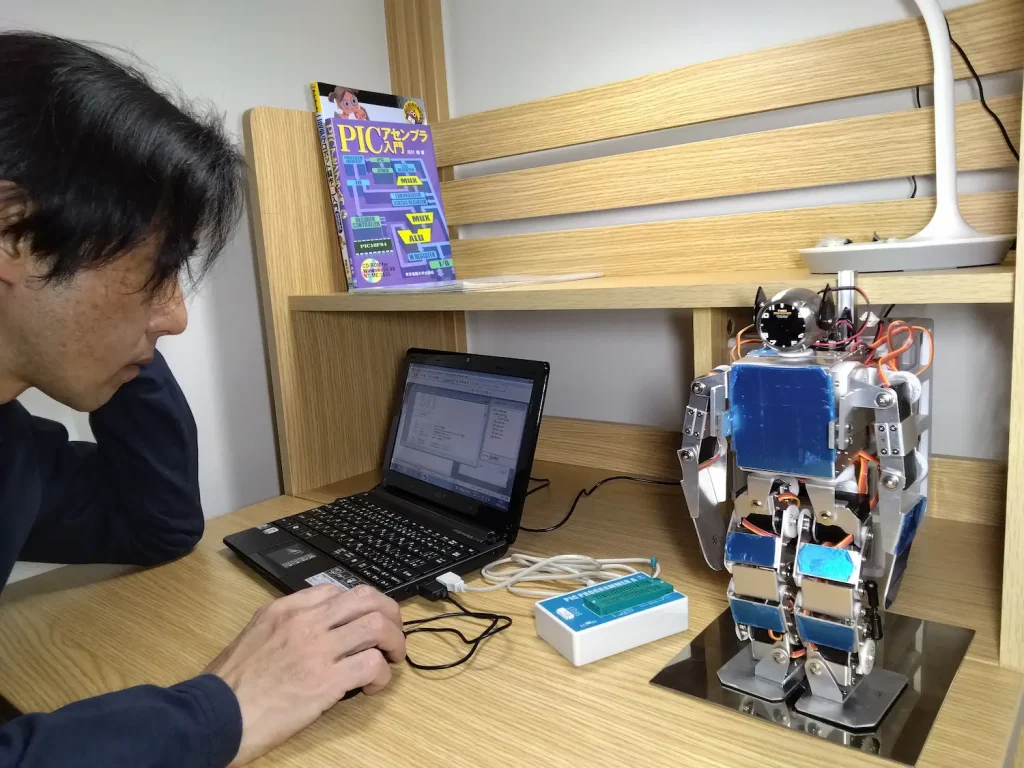
プログラミング
1、基本プログラムの書込み
プログラミングはソフト「MPLAB IDE」を使用。
ソフトはマイクロチップテクノロジージャパンのホームページから無料でダウンロード。
(※現在は「MPLAB X IDE」になっております)
プログラミング言語は「アセンブラ」を使用。
【書込みの方法】
1、パソコン上にて「MPLAB IDE」を立ち上げプログラムを書き込む。
2、プログラムをマイコンが理解出来る言語に変換。(変換は自動で行われます)
3、「ピックプログラマーA+」をパソコンに接続。
4、「ピックプログラマーA+」用のソフト「PICpro」を立ち上げ、変換されたプログラムを読み込む。
5、「ピックプログラマーA+」にPICマイコンをセット。
6、読み込んだプログラムをPICマイコンに書き込み。(書込みを選択すると自動で書込みが行われます)
7、書込みが終了したらロボットの基板にPICマイコンをセット。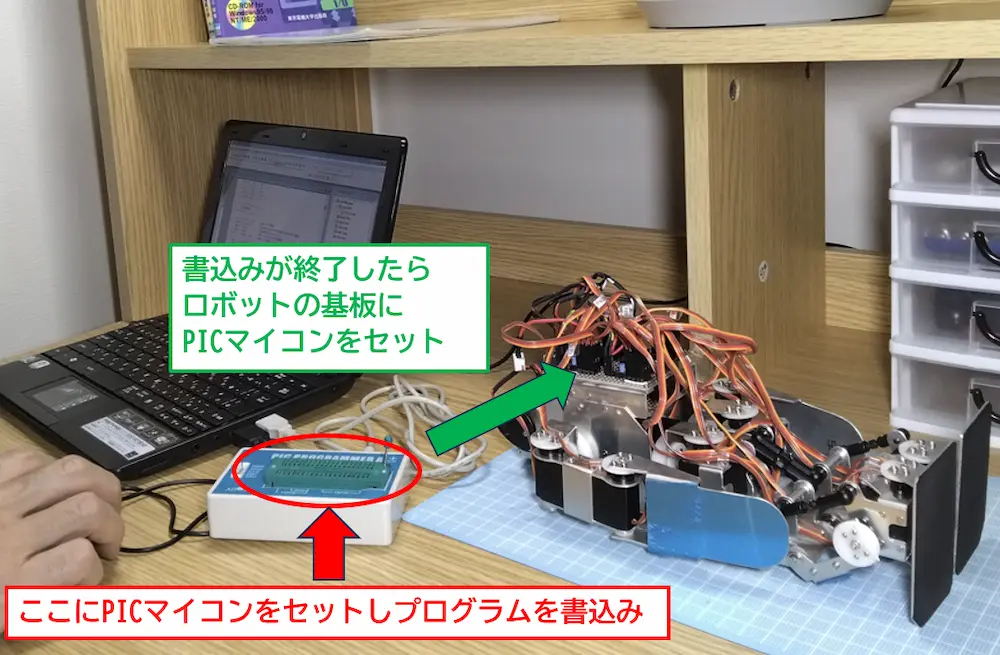
このロボットのプログラムは、私が作成したサーボモータ動作実験用のプログラムを応用して使用しております。
まずは、動作用の基本プログラムをPICマイコンに書き込み問題無く動作するかを確認。(基板の確認にもなります)
異常が無ければ次の作業へ。
2、ロボットの基本姿勢の設定
基本の立ち姿の設定をします。(各サーボモータの原点設定になります)
初期状態では電源を入れると各関節部のサーボモータの向きがまちまちなのでそれらをプログラム上で調整します。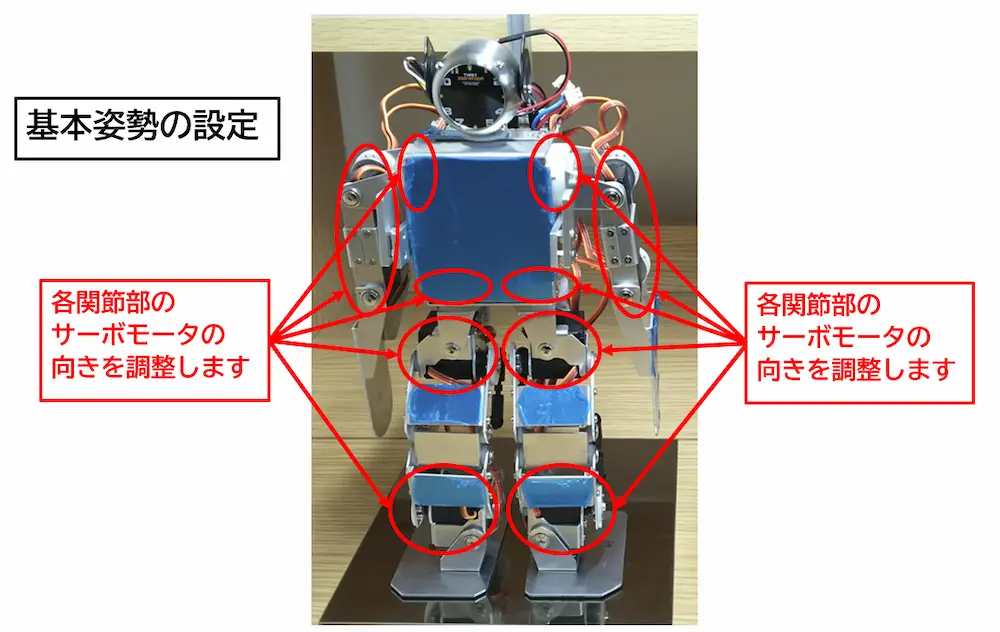
3、歩行モーションの検討・作成
【考え方】
基本的な考え方としては幾つかの姿勢の組合せで歩行動作になります。
それら各姿勢の時のサーボモータの位置を決めていく必要があります。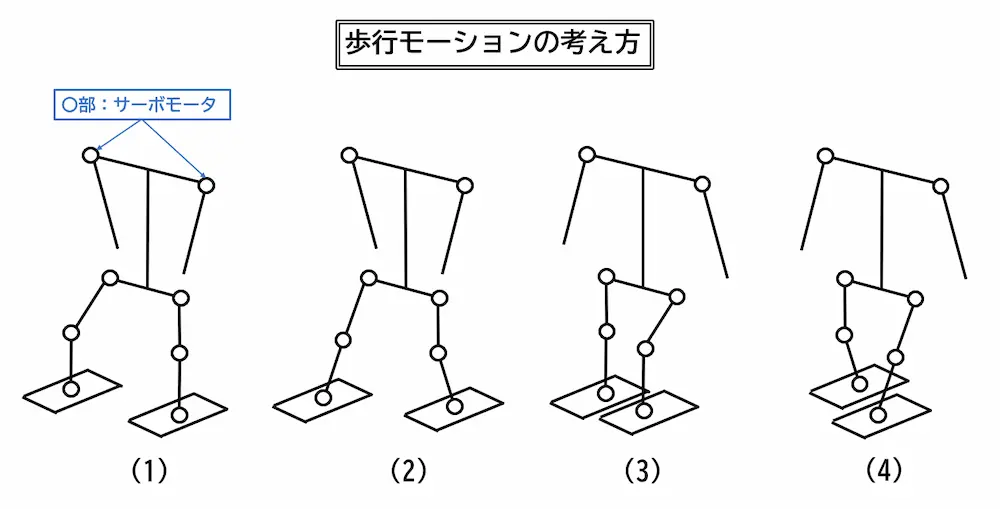
完成
以上の工程を経て無事に完成。(2021年11月に完成)
動作としては「前進」「後退」「右旋回」「左旋回」の4モーション。
二足歩行の基本動作になります。
ロボットの操作には、ゲーム機用のコントローラを改造(無線通信化)したものを使用しております。
歩行動作の動画を以下に添付致します。
さいごに
これから二足歩行ロボットの自作にチャレンジしてみたい皆さんへ。
本格的な二足歩行ロボットの自作には、今回のこの内容をご覧頂いた様に、
設計から製作、プログラミングに至るまでの総合的な力が必要になります。
しかし、最初からその全てにおいてパーフェクトである必要はありません(^^)。
まずは、今の自分に出来る事、足りない事を整理し
足りない所を少しずつ補っていく様にすれば、間違いなく理想の自分に近づいていき、
最終的に二足歩行ロボットも完成する事と思います。
当時の私に足りていなかった事は、「マイコン」と「プログラミング」の能力でした。
私は四苦八苦しながらマイコンを選ぶ所から始まり、結果的に「PICマイコン」を選んでおります。
私がPICマイコンを選んだ理由は、コンパクトで安価、当時学習用の書籍が豊富にあった事と、
PICマイコンが社会の様々な所(家電製品、自動車、計測機器類など)に使用されてきている点です。
そう、これを覚えれば今後、何かと社会の役に立てるのでは、という思いからでした。
今回の内容をきっかけに、
皆さんの電子工作の可能性が一気に広がっていく事を願っております。
最後に、この二足歩行ロボットを自作した時の製作記録をまとめた動画を以下に添付致します。
以上。